
| Организация | Страна | Регион | В наличие | Дата обновления |
|---|
| Фото | Наименование | Произв./Артикул | Ед. изм |
Цена
|
В корзину | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|

|
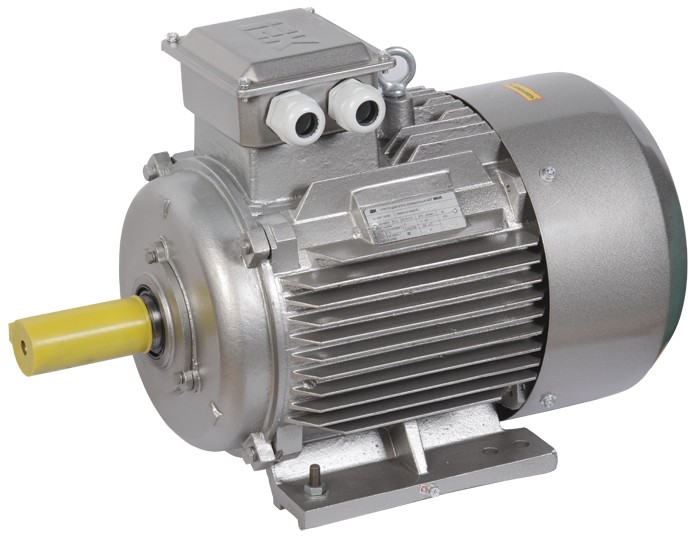
Электродвигатель асинхронный, трехфазный, с короткозамкнутым ротором, общего назначения АИР112M2 7,5кВт 2890об/мин ∆220/Y380В, 50Гц, h.112мм (вар.I), IM2081, средняя станина [M], норм.точности [N], IC411, К-3-II, IE1, IP55, У1 |
IEK / DRV112-M2-007-5-3020 |
|
49 251,06 RUB |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 Асинхронный электродвигатель — электрическая машина переменного тока, частота вращения ротора которой не равна (в двигательном режиме меньше) частоте вращения магнитного поля, создаваемого током обмотки статора.
Асинхронный электродвигатель — электрическая машина переменного тока, частота вращения ротора которой не равна (в двигательном режиме меньше) частоте вращения магнитного поля, создаваемого током обмотки статора.
Асинхронный электродвигатель с короткозамкнутым ротором на сегодняшний момент является основным преобразователем электрической энергии в механическую.
Самым совершенным подходом к устранению вышеуказанных недостатков - это питание двигателя через частотный преобразователь, в котором управление производится по сложным алгоритмам.
 В сравнении
В сравнении












